beinganmeisfun
Member

This is for a class project. Seems to be simple, but I feel I may be overthinking it.
My conveyor motor is controlled by two outputs.
O:0/2 turns the motor in the forward direction.
O:0/1 (relay) and O:0/2 turn the motor on in the revere direction.
Say I wanted to do this...
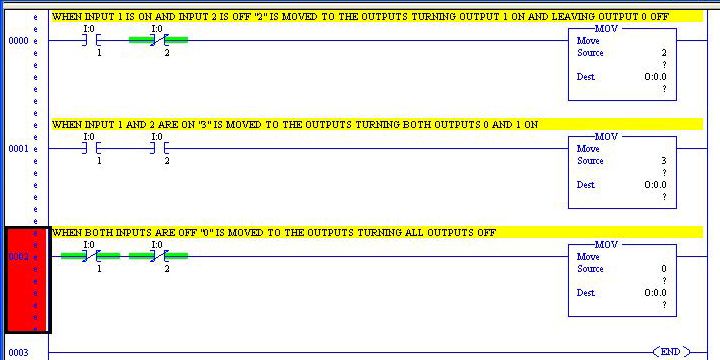
I:0/1 turns on O:0/2
I:0/2 turns on O:0/2 and O:0/1
How would this be written in Logix500 so that I can change directions?
Thanks for any and all help!!
My conveyor motor is controlled by two outputs.
O:0/2 turns the motor in the forward direction.
O:0/1 (relay) and O:0/2 turn the motor on in the revere direction.
Say I wanted to do this...
I:0/1 turns on O:0/2
I:0/2 turns on O:0/2 and O:0/1
How would this be written in Logix500 so that I can change directions?
Thanks for any and all help!!
Last edited: