
produktion
Member

The station is very simple. One robot and one group of I/O.
The robot is the master on the Devicenet bus, with just a connection to the Turck gateway. I believe the robot is seeing the gateway, since it found it when I did a query with the robot. The Devicenet card is configured to Rack 82 of the robot controller. And it will come online fine.
But, I keep getting an invalid state when I try to configure the I/O for the robot.
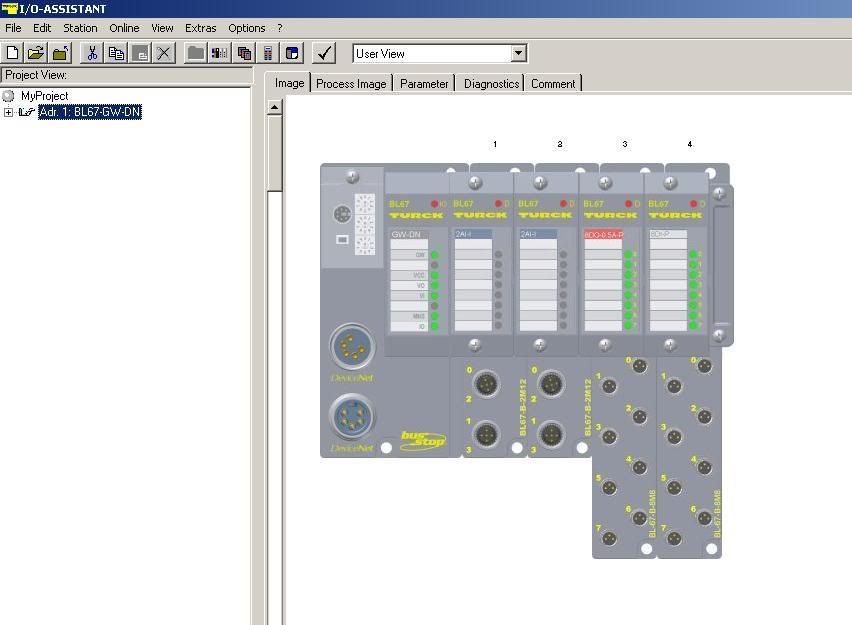
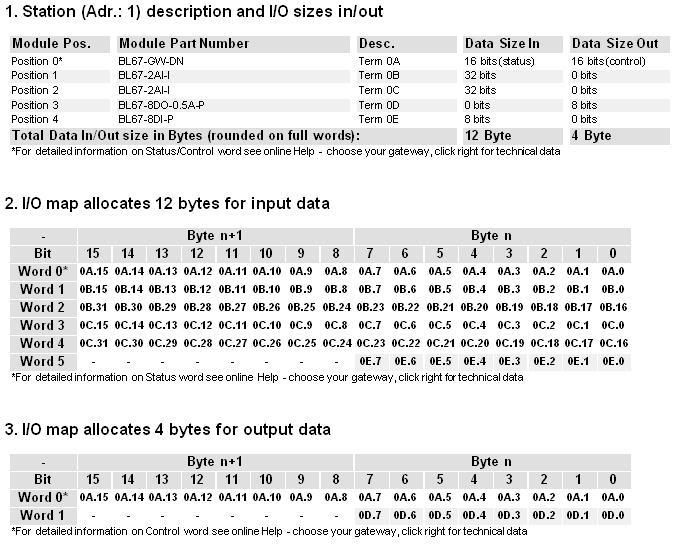
The Turck parts are...
BL67 GW-DN (gateway)
2AI-I (2 analog inputs, not used)
2AI-I (another 2 analog inputs, both used)
8DO-0.5A-P (8 digital outputs, not used)
8DI-P (8 digital inputs, 2 used)
I am using two lazer sensors that send a digital signal back that the detection is within range... and I can see the digital input toggling fine on the card.
There is also a analog input that is the exact location of the part being detected. The analog card that this is connected to has the red diagnostics light blinking. Actually both the cards do.
I have the baud rate set correct, and the devicenet node is 40 and this should be fine also.
Here is the Turck setup.
Here is from I/O assistant from turck.
Where I am at is trying to get the robot to recognize the I/O... I tried to set up the digital inputs, and I THINK that is ok... but the analog just is not working right for me.
I am trying to get the connection cable for the Turck so I can read the diagnostics on it.
The robot is the master on the Devicenet bus, with just a connection to the Turck gateway. I believe the robot is seeing the gateway, since it found it when I did a query with the robot. The Devicenet card is configured to Rack 82 of the robot controller. And it will come online fine.
But, I keep getting an invalid state when I try to configure the I/O for the robot.
The Turck parts are...
BL67 GW-DN (gateway)
2AI-I (2 analog inputs, not used)
2AI-I (another 2 analog inputs, both used)
8DO-0.5A-P (8 digital outputs, not used)
8DI-P (8 digital inputs, 2 used)
I am using two lazer sensors that send a digital signal back that the detection is within range... and I can see the digital input toggling fine on the card.
There is also a analog input that is the exact location of the part being detected. The analog card that this is connected to has the red diagnostics light blinking. Actually both the cards do.
I have the baud rate set correct, and the devicenet node is 40 and this should be fine also.
Here is the Turck setup.
Here is from I/O assistant from turck.
Where I am at is trying to get the robot to recognize the I/O... I tried to set up the digital inputs, and I THINK that is ok... but the analog just is not working right for me.
I am trying to get the connection cable for the Turck so I can read the diagnostics on it.
Last edited: