Good day All,
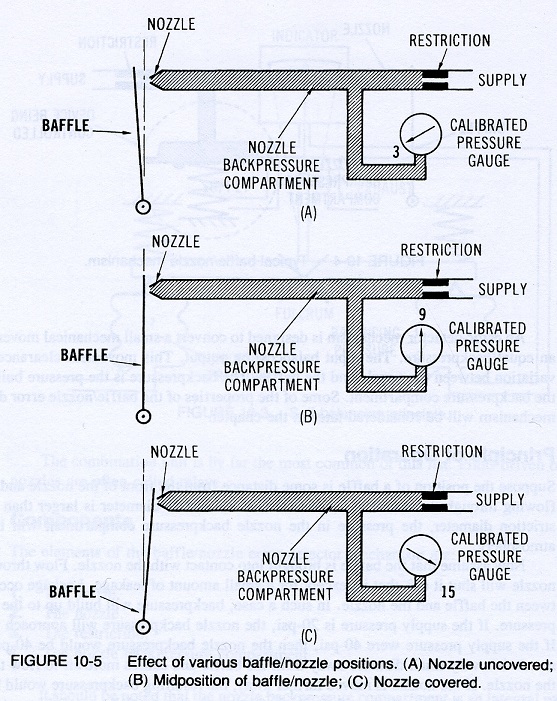
I am curious to know why do these instruments try to maintain a constant pressure through the flapper/nozzle assembly eg I/P converter or pneumatic positioner.
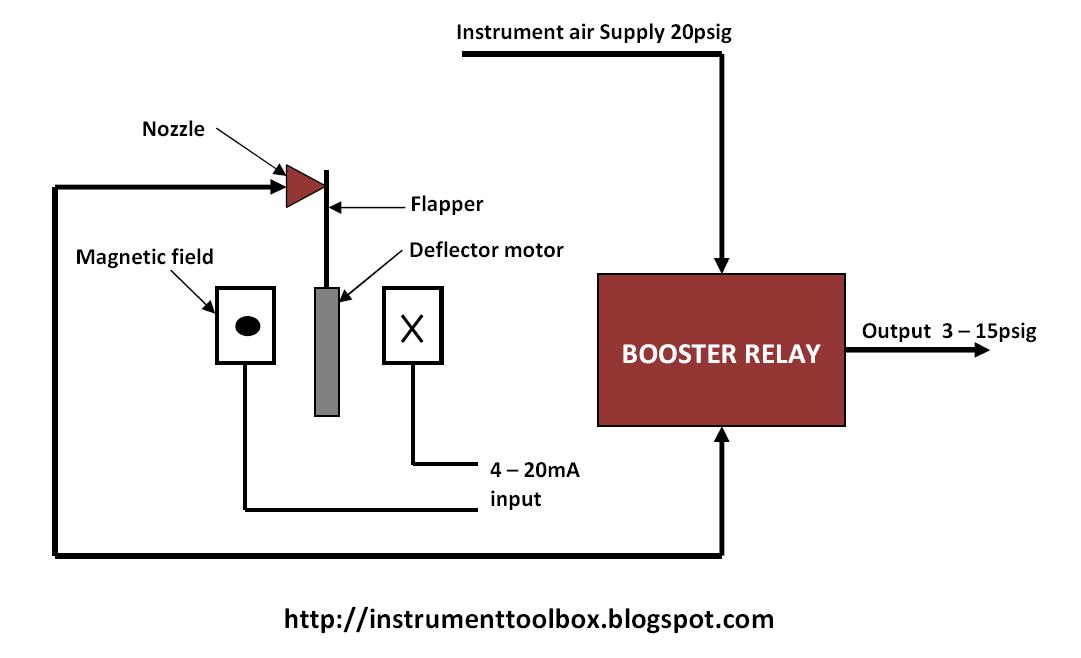
I/P converter :
when a back pressure is reached, this back pressure is fed to the relay/booster. Then the bellows linked to an arm counter acts and allows the nozzle to move away from baffle, causing the back pressure to fall. So since the back pressure falls and back pressure is now reduced in relay/booster, how does the pressure to the actuator now increase to open the actuator /valve, when trying to open the actuator/valve.
Pneumatic positioner:
why is there a feedback spring/arm via a spindle/cam to counter act the 3-15psig, air that is been supplied to the diagram to shuttle the spool valve.
Correct me if I'm wrong, if there isn't any force trying to counter the spool valve movement, any value between 3-15psig will drive the actuator/valve fully open???
Please correct my understanding,it would be greatly appreciated.
Thanks in advance.
I am curious to know why do these instruments try to maintain a constant pressure through the flapper/nozzle assembly eg I/P converter or pneumatic positioner.
I/P converter :
when a back pressure is reached, this back pressure is fed to the relay/booster. Then the bellows linked to an arm counter acts and allows the nozzle to move away from baffle, causing the back pressure to fall. So since the back pressure falls and back pressure is now reduced in relay/booster, how does the pressure to the actuator now increase to open the actuator /valve, when trying to open the actuator/valve.
Pneumatic positioner:
why is there a feedback spring/arm via a spindle/cam to counter act the 3-15psig, air that is been supplied to the diagram to shuttle the spool valve.
Correct me if I'm wrong, if there isn't any force trying to counter the spool valve movement, any value between 3-15psig will drive the actuator/valve fully open???
Please correct my understanding,it would be greatly appreciated.
Thanks in advance.
Last edited: