
theColonel26
Lifetime Supporting Member

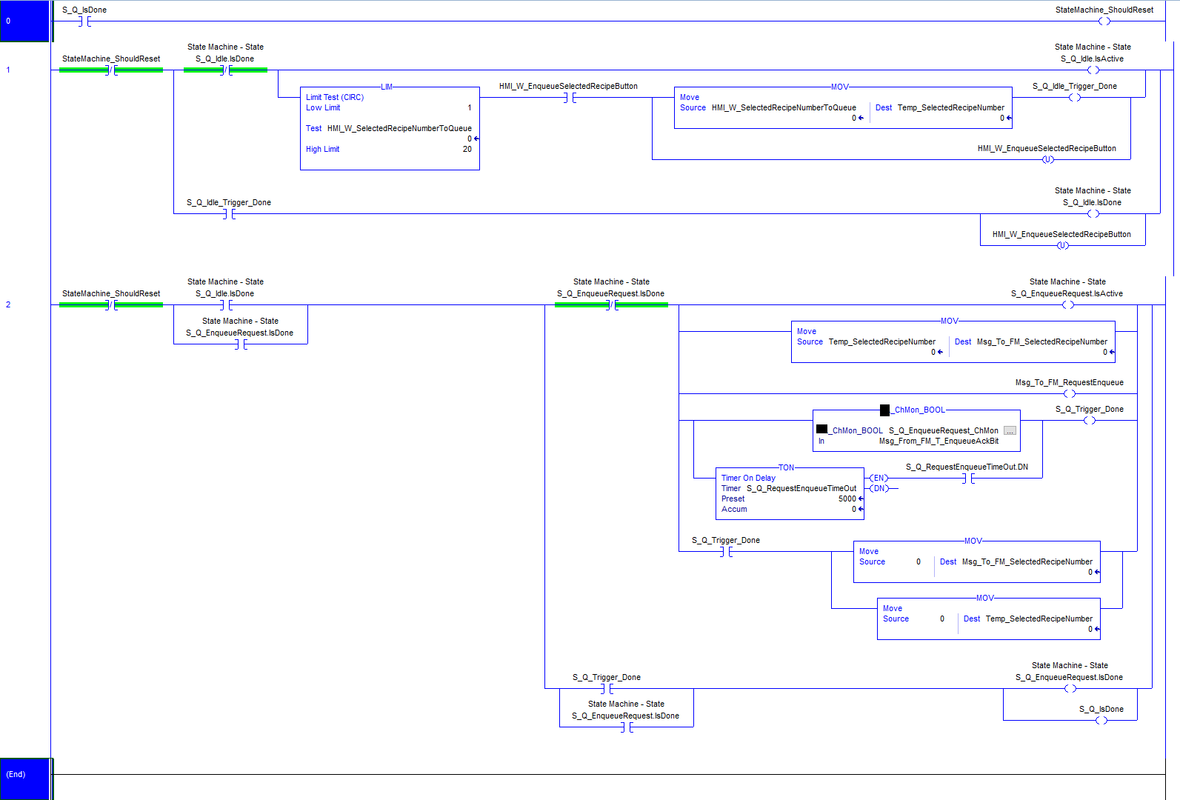
So I just wrote this 2 state, state machine. For sending a request to be added to a queue on a remote PLC.
Pretty simple,
Pretty simple,
- Sit idle until Recipe number is valid and user presses a button
- Then move to next state
- Send RecipeNumber and Send Request to Enqueue.
- Wait for Ack back from Machine that the recipe has been successfully enqueued or that the request has timed out.
- Then reset everything back to idle.




 The S_Q_Idle_Trigger_Done was on purpose (Don't remember why right now). But the 2 -(u)- HMI_W_EnqueueElectedRecipeButtons were not.
The S_Q_Idle_Trigger_Done was on purpose (Don't remember why right now). But the 2 -(u)- HMI_W_EnqueueElectedRecipeButtons were not.