

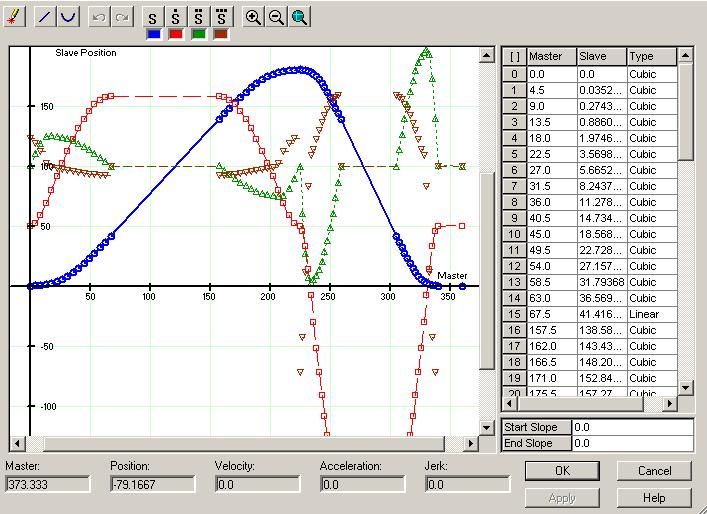
im finding out the cause of a chain link breakage and I would like to ask for advice in this good forum. The chain is with a servo(kinetix 6000+17, rslogix v17) controlling which controls a filling hose. attached below is the profile used in MAPC instrcution
 .
.
EDIT: The servo follows the curve under numerous cycles.
position gains:
proportional 151.99413
integral:5.775554
velocity gains
proportional: 389.105
integral: 0
feed forward gains both 0
integrator hold enabled
max speed: 637.50006
max accel:13088.422
max decel: 14390.466
max accel jerk 268716.5
max decel jerk: 324839.97
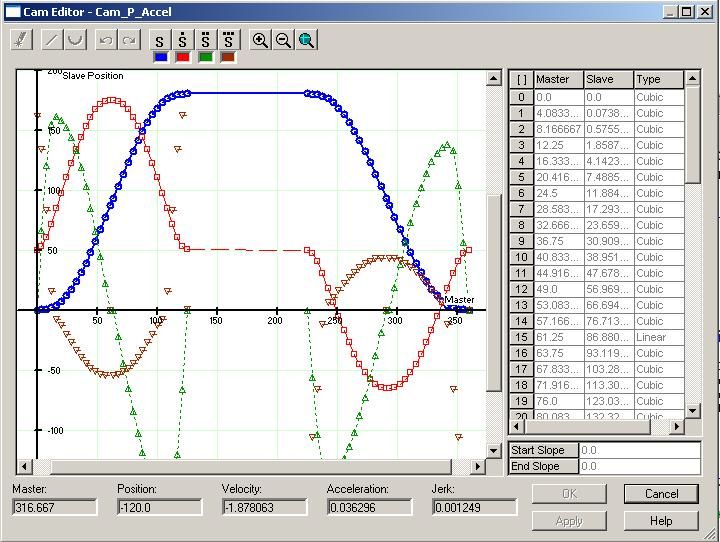
I am thinking that the cause is the reverse motion after reaching the maximum point without any rest so in order to have address that, the speed is really sacrificed and the profile will be changed to this or something similar
 .
.
Thank you for any advice.
EDIT: The servo follows the curve under numerous cycles.
position gains:
proportional 151.99413
integral:5.775554
velocity gains
proportional: 389.105
integral: 0
feed forward gains both 0
integrator hold enabled
max speed: 637.50006
max accel:13088.422
max decel: 14390.466
max accel jerk 268716.5
max decel jerk: 324839.97
I am thinking that the cause is the reverse motion after reaching the maximum point without any rest so in order to have address that, the speed is really sacrificed and the profile will be changed to this or something similar
Thank you for any advice.
Last edited:



