FreeAtLast
Member

Hi All,
I have a large servo indexer chassis that uses an AB servo and Kinetix 5500 drive. It seems logical to me to try to limit the amount of damage that the indexing nests can do in the event of tooling in the way during a jog override (for ex). So I've been monitoring these parameters in the PLC to see what their max values are during normal autocycle:
MyIndexer.TorqueReference
MyIndexer.CurrentFeedback
Their max's are 79 and 80, respectively.
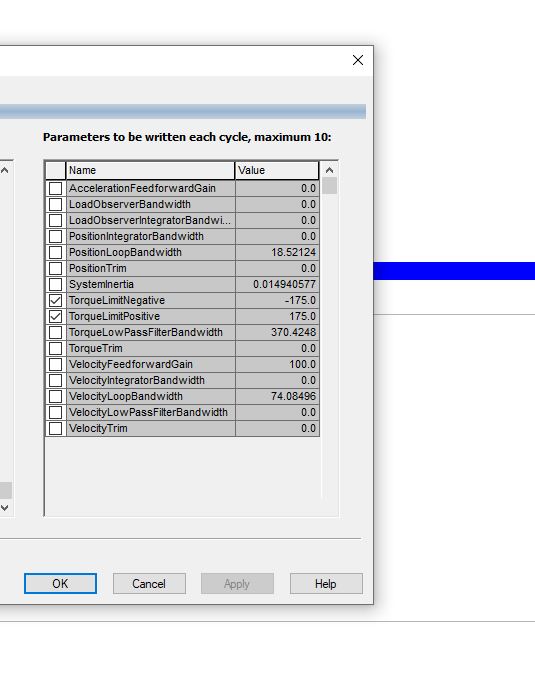
Do you know if I should reduce the "Peak Torque Limit Positive" and "Peak Torque Limit Negative" in the axis config in order to put a cap on how much damage the indexer can do?
Thanks for your advice,
Brian
I have a large servo indexer chassis that uses an AB servo and Kinetix 5500 drive. It seems logical to me to try to limit the amount of damage that the indexing nests can do in the event of tooling in the way during a jog override (for ex). So I've been monitoring these parameters in the PLC to see what their max values are during normal autocycle:
MyIndexer.TorqueReference
MyIndexer.CurrentFeedback
Their max's are 79 and 80, respectively.
Do you know if I should reduce the "Peak Torque Limit Positive" and "Peak Torque Limit Negative" in the axis config in order to put a cap on how much damage the indexer can do?
Thanks for your advice,
Brian