
Peter Nachtwey
Member

MaxK calculated the linear acceleration rate for ramping up and then ramping down. He did not provide a good polynomial that will result in a good s-curve.Not unsatisfactory at all, it is very helpful thank you. However from what i can understand this has a constant acceleration is that correct? How would i add smoothing to the acceleration curve as well?
Thank you for your help!!
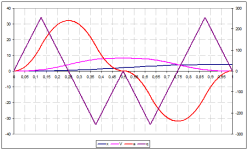
A s-curve should have an initial acceleration of zero and and final acceleration of zero at the end of the ramp up. Also the deceleration rate should be 0 at the beginning of the ramp down and and the ending of the ramp down. Since MaxK's constant acceleration rate is 16 m/s^2, the peak acceleration during the ramp up will be about 1.5 times that or 24 m/s^2. Are you sure you can accelerate that fast? That is over 2.3g. Also, MaxK calculated a peak speed of 8 m/s. Are the motor can move the load that fast? I haven't checked MaxK's calculations for acceleration but it looks reasonable. You should know whether the system will be speed or acceleration limited. There are tradeoffs that can be made where the top speed can be reduced if the motor can accelerate quicker.
The mass of your camera system will make a difference too.
After you have designed your system so it is possible to control then buy a real motion controller. Above, drbitboy posted some info about 7 segment motion. It is valid but it avoids the complexities on doing 7 segment motion control. I your case you can chose all the numbers so you don't have round off problems. For instance, what if a segment takes 66.66 millisecond to complete but your PLC can only do 1 millisecond scans. What do you do? A 33 millisecond error times 7 segments is a lot of time AND distance.


") .
.
